

Bagaimanakah Manipulator Pemuatan dan Pemunggahan Pintar meningkatkan produktiviti?
 Berita Industri
Berita Industri
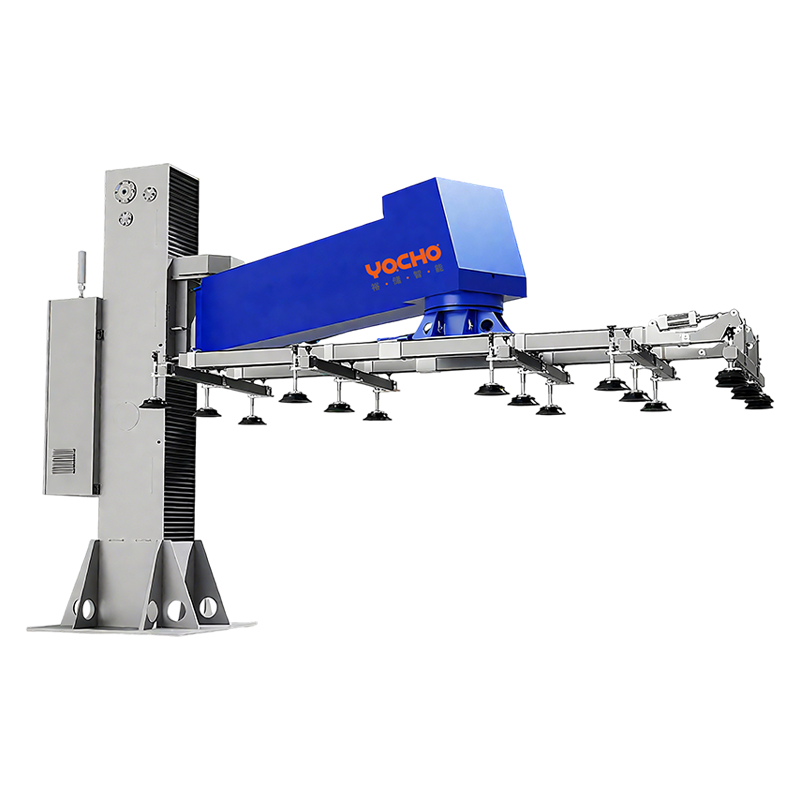
Pengenalan kepada Manipulator Pemuatan dan Pemunggahan Pintar
Manipulator pemuatan dan pemunggahan pintar ialah sistem robotik termaju yang direka untuk mengautomasikan tugas pengendalian bahan dalam pembuatan dan logistik. Dengan menggabungkan kawalan gerakan, penderia dan kecerdasan buatan yang tepat, manipulator ini boleh melaksanakan tugas berulang dengan cekap, mengurangkan keperluan untuk buruh manual. Artikel ini meneroka cara sistem ini meningkatkan produktiviti, meningkatkan kecekapan operasi dan menyediakan faedah perniagaan yang boleh diukur.
Automasi dan Buruh Manual Berkurangan
Salah satu cara paling langsung manipulator pintar meningkatkan produktiviti adalah dengan mengautomasikan proses intensif buruh. Tugas seperti memilih, meletakkan dan memindahkan bahan, yang biasanya memerlukan berbilang pengendali, boleh diselesaikan dengan lebih cepat dan dengan ketepatan yang konsisten.
Meminimumkan Kesilapan Manusia
Pengendalian manual terdedah kepada kesilapan seperti salah jajaran, kerosakan pada komponen atau peletakan yang salah. Manipulator pintar menggunakan sensor dan algoritma kawalan yang tepat untuk memastikan setiap operasi adalah tepat, mengurangkan ralat dan pembaziran bahan.
Keupayaan Operasi 24/7
Tidak seperti pengendali manusia, manipulator boleh beroperasi secara berterusan tanpa keletihan. Ini membolehkan barisan pengeluaran berjalan 24/7, meningkatkan daya pengeluaran dengan ketara dan memastikan keluaran yang konsisten dalam persekitaran permintaan tinggi.
Ketepatan dan Ketekalan
Ketepatan adalah penting dalam pembuatan moden, terutamanya apabila mengendalikan komponen halus atau melaksanakan tugas pemasangan yang kompleks. Manipulator pintar memberikan kebolehulangan yang tinggi, memastikan setiap pergerakan dilaksanakan tepat seperti yang diprogramkan.
Kedudukan dan Penjajaran yang Tepat
Manipulator lanjutan dilengkapi dengan sistem penglihatan dan penderia yang membolehkan mereka mengesan kedudukan objek yang tepat. Ini memastikan penjajaran yang betul semasa memuatkan atau memunggah, mengurangkan risiko kerosakan produk dan meningkatkan kualiti pengeluaran keseluruhan.
Mengekalkan Output Seragam
Operasi yang konsisten meminimumkan kebolehubahan antara unit, yang penting untuk industri yang memerlukan standard kualiti yang ketat. Keseragaman ini juga mengurangkan kerja semula hiliran, menjimatkan masa dan sumber.
Kelajuan dan Pengoptimuman Masa Kitaran
Manipulator pintar direka untuk beroperasi pada kelajuan yang dioptimumkan, mengimbangi pergerakan pantas dengan pengendalian yang tepat. Masa kitaran yang lebih pantas secara langsung menyumbang kepada produktiviti yang lebih tinggi dan penggunaan sumber pengeluaran yang lebih cekap.
Kawalan Pergerakan Adaptif
Robot yang dilengkapi dengan kawalan gerakan adaptif boleh melaraskan kelajuan dan trajektorinya berdasarkan berat, bentuk dan orientasi objek. Ini meminimumkan masa terbiar dan memastikan operasi yang lebih lancar, meningkatkan kecekapan keseluruhan.
Operasi Selari
Sesetengah manipulator pintar boleh melakukan tugas serentak, seperti memilih satu item sambil meletakkan yang lain. Operasi selari mengurangkan masa kitaran dan meningkatkan daya pengeluaran tanpa campur tangan manusia tambahan.
Integrasi dengan Sistem Pengeluaran
Manipulator pintar boleh disepadukan dengan sistem automatik lain, termasuk tali pinggang penghantar, mesin CNC dan talian pembungkusan. Penyepaduan yang lancar memastikan aliran kerja yang lancar, mengurangkan kesesakan dan meningkatkan kecekapan pengeluaran keseluruhan.
Pemantauan dan Maklum Balas Masa Nyata
Manipulator yang disambungkan menyediakan data masa nyata tentang status operasi, pengesanan ralat dan metrik prestasi. Maklumat ini membolehkan pengurus membuat keputusan termaklum, mengoptimumkan jadual pengeluaran dan mengurangkan masa henti.
Fleksibiliti dalam Pengeluaran
Manipulator pintar boleh diprogram semula dengan cepat untuk jenis produk atau konfigurasi baris yang berbeza. Fleksibiliti ini menyokong pengeluaran tepat dalam masa dan mengurangkan masa henti yang dikaitkan dengan pertukaran, meningkatkan produktiviti keseluruhan.
Keselamatan dan Risiko Tempat Kerja yang Dikurangkan
Mengautomasikan tugas pemunggahan dan pemunggahan mengurangkan risiko kecederaan di tempat kerja yang disebabkan oleh pengangkatan berat, gerakan berulang atau bahan berbahaya. Persekitaran kerja yang lebih selamat mengurangkan masa henti akibat kemalangan dan meningkatkan kecekapan tenaga kerja secara keseluruhan.
Faedah Ergonomik
Dengan mengendalikan tugas yang menuntut secara fizikal, manipulator pintar mengurangkan keletihan dan kecederaan pengendali. Ini membolehkan pekerja manusia menumpukan pada tugas bernilai lebih tinggi, meningkatkan produktiviti pada pelbagai peringkat proses pengeluaran.
Kelewatan Berkaitan Ralat Dikurangkan
Pengendalian automatik mengurangkan kesilapan yang boleh menyebabkan pengeluaran terhenti atau memerlukan kerja semula. Gangguan yang lebih sedikit dan prestasi yang konsisten menyumbang secara langsung kepada pemprosesan yang lebih tinggi dan jadual output yang boleh diramal.
Jadual Perbandingan: Manipulator Manual lwn Pintar
| Ciri | Memuat/Memunggah secara Manual | Manipulator Pintar |
| Kelajuan | Terhad oleh kemampuan manusia | Kitaran berkelajuan tinggi dan dioptimumkan |
| Konsisten | Pembolehubah, terdedah kepada ralat | Kebolehulangan dan ketepatan yang tinggi |
| Keperluan Buruh | Berbilang pengendali diperlukan | Campur tangan pengendali yang minimum |
| Fleksibiliti | Terhad kepada kemahiran manusia | Pemrograman semula pantas untuk tugasan yang berbeza |
| Keselamatan | Risiko kecederaan daripada pengendalian manual | Mengurangkan bahaya tempat kerja |
Kesimpulan
Manipulator pemuatan dan pemunggahan pintar meningkatkan produktiviti dengan ketara dengan mengautomasikan tugasan berulang, memastikan ketepatan dan ketekalan, mengoptimumkan masa kitaran, menyepadukan dengan lancar dengan sistem pengeluaran dan meningkatkan keselamatan tempat kerja. Dengan memanfaatkan teknologi termaju ini, pengilang boleh mencapai daya pengeluaran yang lebih tinggi, mengurangkan kos buruh dan mengekalkan kelebihan daya saing dalam persekitaran perindustrian yang semakin automatik.





Jika anda berminat dengan produk kami, sila rujuk kami
PRODUK
PAUTAN CEPAT
PUSAT BERITA
TERMINAL MUDAH ALIH

HUBUNGI KAMI
- ALAMAT: Bilik 205, Bangunan Pejabat, Shandong Yurui Machinery Group Co., Ltd., di persimpangan Jalan Banqiao dan Jalan Huangjin, Jalan Pingyi, Daerah Pingyi, Bandar Linyi, Wilayah Shandong.
- TELEFON: +86-19819101584
- EMAIL: [email protected]
Linyi Yocho Storage Intelligent Manufacturing Co.,Ltd. SEMUA HAK TERPELIHARA. SEMUA TERPELIHARA. Pengeluar Rak Gudang Kilang Rak Gudang
